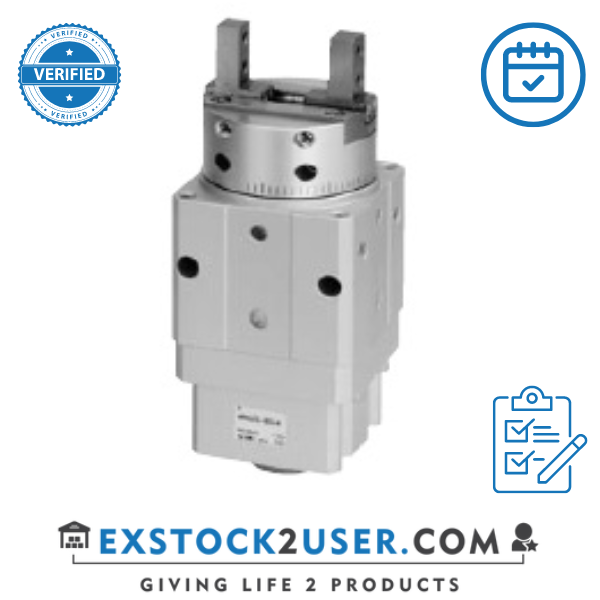
SMC Make MRHQ16D-180S-N
(0
reviews)
Sold by:
Inhouse product
Inhouse product
Price:
AED1,914.15
/pcs
Share:
Top Selling Products
-

GSI-16G - IBOCO-PVC TUBING
AED290.56 -
60042RSR BEARING / SEAL MAKE FAG
AED14.70 -
RGR25R1010H LINEAR GUIDEWY MAKE HIWIN
AED601.65 -
5202 2RS BALL BEARING MAKE : JAF
AED29.40 -
63/28NR BEARING / SEAL MAKE: KOYO
AED22.00






| How Grip | Pinch, Parallel Type / Open, Parallel Type | Number of Fingers | 2 pcs. |
|---|---|---|---|
| Open Dimension L1(mm) | 20.9 | Closed Dimension L2(mm) | 14.9 |
| Type | [Main Body] Body | Operation Method | Double Acting |
| Main Body Shape | Cylindrical Shape | Gripping Force (Closed Side at 0.5 Mpa)(N) | 30 |
| Gripping Force (Open Side at 0.5 Mpa)(N) | 40 | Environment, Applications | Standard |
| Additional Function | Not Provided | Stroke Adjustment Mechanism | Not Provided |
| Auto switch | Without auto switch (built-in magnet) | Number Of Switches | None |
| Lead wire length | None | Gripper internal diameter(φ) | 16 |
| Angle of rotation(°) | 180 | Auto switch for rotation detector | Without auto switch (built-in magnet) |
There have been no reviews for this product yet.